Программный модуль «RuMap: RoadSignsRecognition» от ЗАО «Геоцентр-Консалтинг» был создан в ходе работ над платформой автоматизированного оперативного создания и актуализации универсального графа движения («RuMap: RoadNetworkBuilder») и является частью данной платформы. Работы проводились в ходе выполнения НИОКР по программе «Развитие-ЦП-1» в соответствии с договором о предоставлении гранта, заключенным ЗАО «Геоцентр-Консалтинг» с Федеральным государственным бюджетным учреждением «Фонд содействия развитию малых форм предприятий в научно-технической сфере». Данные с видеорегистраторов рассматривались, как один из источников исходных данных для работы платформы «RuMap: RoadNetworkBuilder».
Программный модуль «RuMap: RoadSignsRecognition» предназначен для распознавания знаков дорожного движения по данным с видеорегистраторов (видеофайлов и соответствующих им файлов треков движения транспортных средств) и формирования набора данных, содержащих навигационную информацию для дорожного графа.
Приложение распознаёт знаки, которые непосредственно влияют на построение автомобильного маршрута (знаки направления движения по полосе (ПДД 5.15.2 ), подземных (6.6) и надземных (6.7) пешеходных переходов, знаки выделенной полосы (5.14) и т.п.).
Идея об автоматическом распознавании знаков нашла свое отражение при работе автомобильных навигаторов, а также является встроенной функцией в некоторых автомобилях, которая должна помогать водителю соблюдать скоростной режим на дорогах. И в том, и в другом случае водитель получает на экран информацию о распознанном знаке. Однако при распознавании в режиме реального времени встречается ряд трудностей: плохо или совсем не распознаются знаки, размещенные под углом, висящие над дорогой и раскачивающиеся от ветра; распознавание затруднено при сильном дожде, в темное время суток или при ярком солнце (бликах).
Такое распознавание основано на сверке изображения встреченного знака с изображением знаков во встроенной базе данных, а если нужный знак не найден, система или навигатор обращаются к загруженным в ПО картам и выводят знаки на дисплей в соответствии с ними. Таким образом, корректность информирования водителя будет зависеть от актуальности карты, в том числе от актуальности дорожного графа.
Однако, изменение расположения знаков на дороге происходит достаточно часто: это и открытие новых участков, и проведение ремонтных работ, и прочие причины, по которым знаки могут быть сняты, передвинуты и т.п.. Работы по обновлению дорожных карт занимают большое количество времени. Проводить такую работу только в ручном режиме очень дорого и долго, поэтому в различных компаниях используются дополнительные возможности, помогающие частично автоматизировать ручной труд картографов.
В основе работы программного модуля «RuMap: RoadSignsRecognition» от ЗАО «Геоцентр-Консалтинг» лежит использование нейросетей для детекции и классификации знаков дорожного движения.

Рисунок 1. Пример классификации синих предписывающих знаков
После распознавания знака осуществляется вычисление его географических координат относительно положения камеры, исходя из параметров изображения и оптических свойств камеры. Положение камеры, в свою очередь, определяется через синхронизацию трека движения со временем видеозаписи.
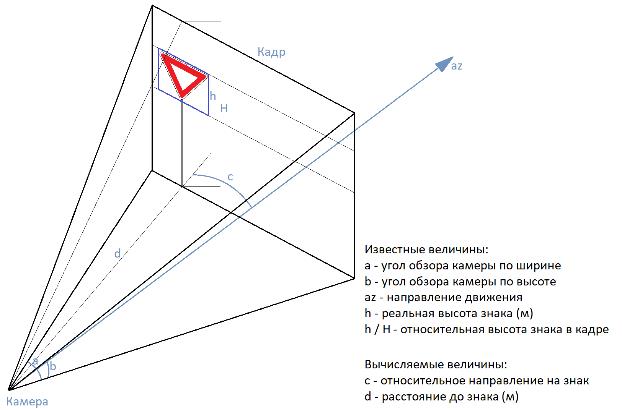
Рисунок 2. Определение расстояние и направления знака
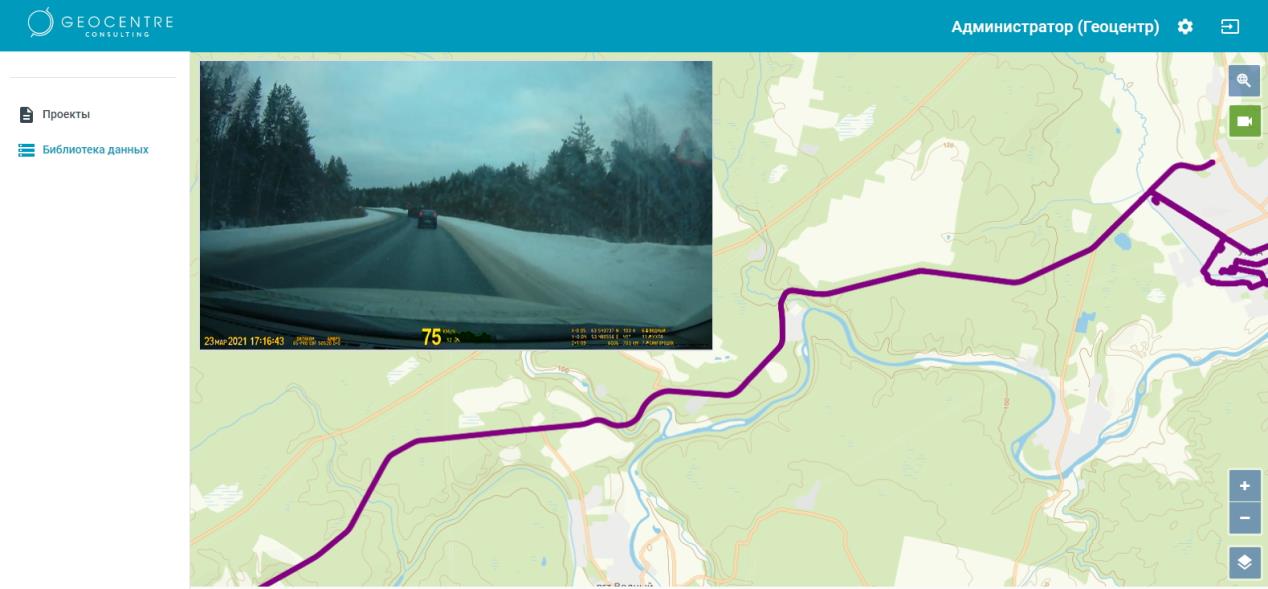
Рисунок 3. Пример трека движения и видео, загруженного в систему "RuMap: RoadNetworkBuilder"
Результатом работы приложения является набор точек с информацией о направлении и типе знака дорожного движения. Далее точки привязываются к ребрам графа и данные знаков дорожного движения переносятся в атрибуты дорожного графа.
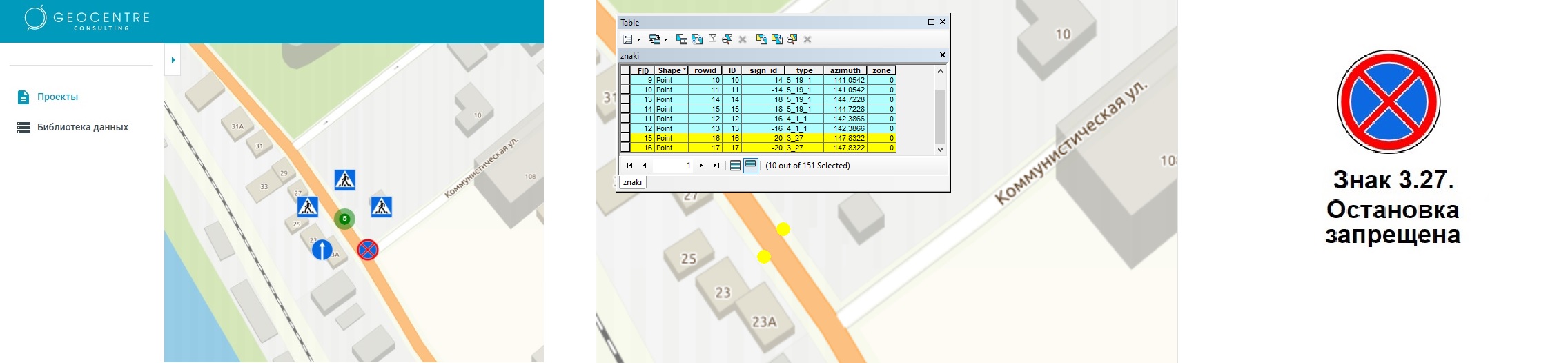
Рисунок 4. Пример загрузки распознанных знаков в гис-программу
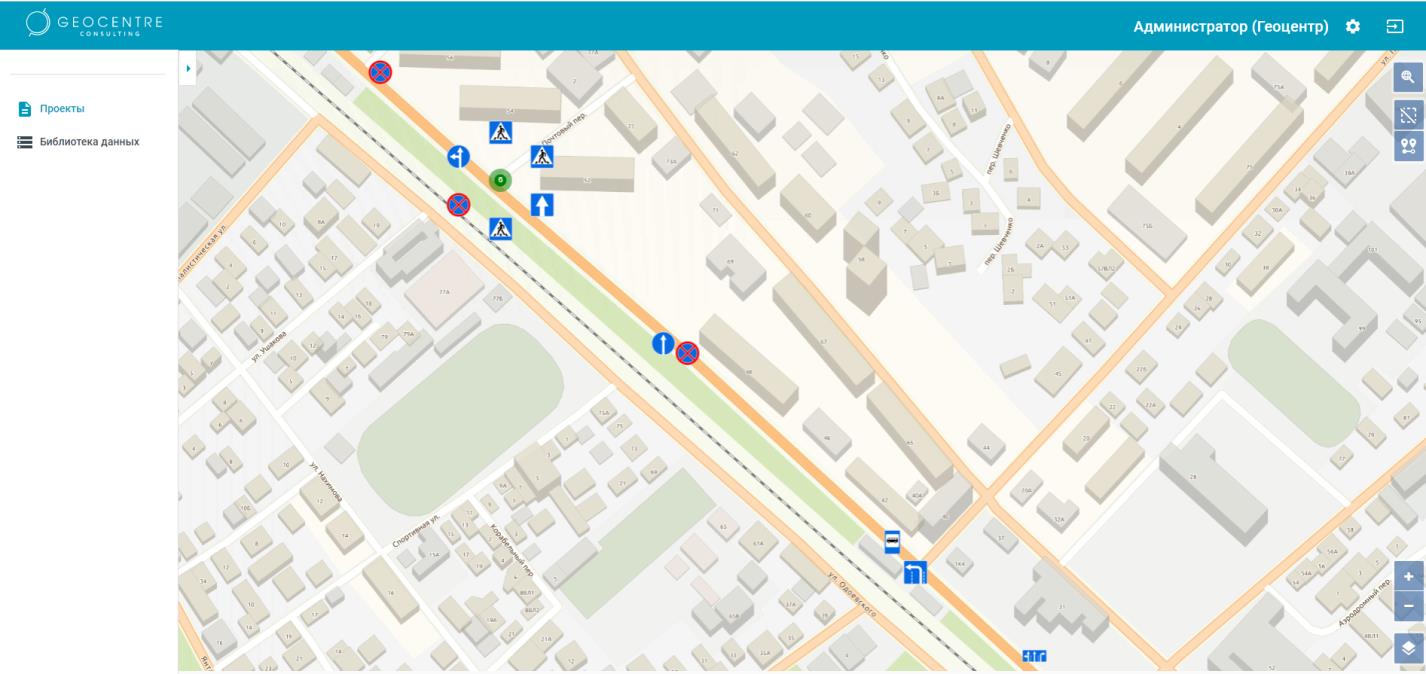
Рисунок 5.Пример отображения знаков на карте в системе "RuMap: RoadNetworkBuilder"
Для получения более подробной информации о продуктах и услугах компании обращайтесь по адресу sale@digimap.ru или телефону +7 (495) 775-05-49.





